Challenge #1:
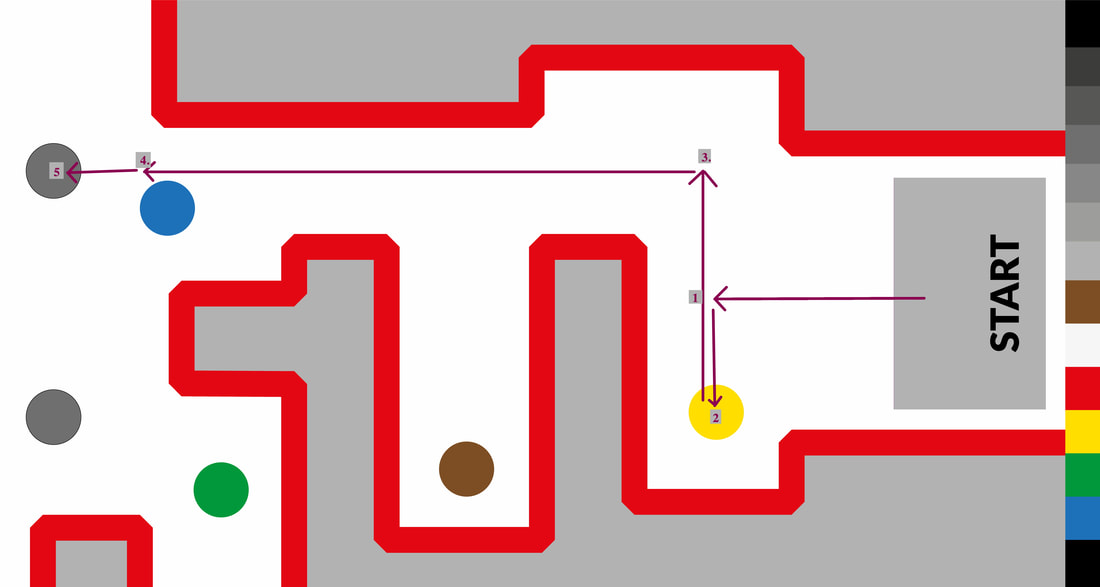
1. Program your robot to drive from the "Start" line forward, then turn 90 degrees and stop on the Yellow Dot.
2. Back up the robot 90 degrees and then proceed forward to the grey dot at the end of the field. The robot will need to turn slightly every few inches to end up over the grey dot.
See Challenge #1 Field Below